Background and Motivation¶
Note
这篇文章很有水平! 感觉其含金量不低于某些 nsdi 的 paper
尤其是这一章节, 不管是内容还是行文逻辑都太值得学习了!
Motivation¶
为了真实反映大规模低轨卫星网络并作为“数字孪生”系统运行,仿真器必须满足以下三个关键特性:
-
极高的大规模扩展能力 (Scale):
- 现代低轨星座系统本质上是极其庞大的(例如 Starlink 拥有数千颗卫星和超过 800 万活跃用户)
- 网络级别的行为(如切换决策、路由、流量工程)只有在大规模环境下才能准确建模
- 例如,为了最大化网络利用率,庞大且动态的卫星网络需要全局视角的网络编排控制器,而不是像小型网络那样仅靠简单的“贪心”策略(如连接信号最强的节点)
-
敏捷的响应能力 (Responsiveness):
- 卫星网络具有高度的动态性(卫星不断上线/退役,网络拓扑不断变化,用户需求实时波动)
- 网络数字孪生系统必须能够连续不间断地实验,这就要求底层仿真平台必须具备极高的响应速度以适应实时变化,而不能产生明显的计算中断
-
真实的流量模型 (Realistic Traffic):
- 仿真器必须能够处理由真实应用程序实时生成的数据包
- 只有在高度真实的流量交互下,网络级的规模效应才能被准确模拟
Related Work¶
如 Table 1 所示,现有的卫星网络仿真/模拟工具分为三大类
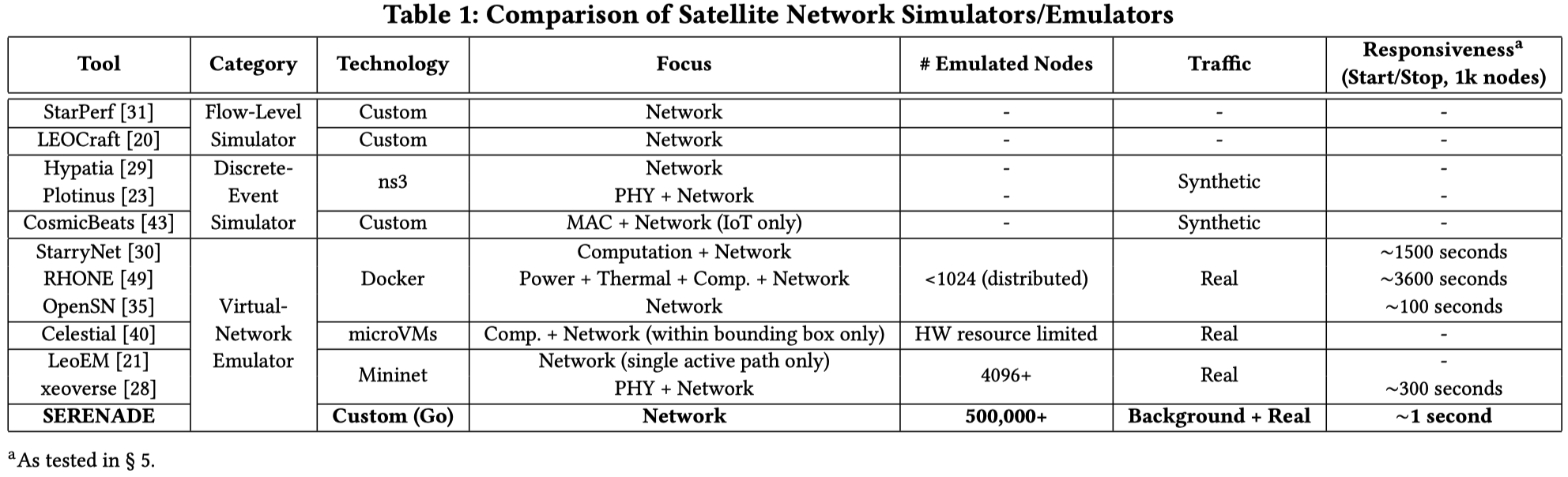
它们在满足上述数字孪生需求时的根本缺陷:
-
流级模拟器 (Flow-Level Simulators):
- 代表工具:StarPerf, LEOCraft
- 局限性:
- 将流量抽象为聚合流,忽略了数据包级别的动态变化
- 它们无法处理真实的应用程序流量,因此无法呈现真实的拥塞动态或应用层行为
-
离散事件模拟器 (Discrete-Event Simulators):
- 代表工具:Hypatia, Plotinus, CosmicBeats
- 局限性:
- 依靠调度事件来推进时间,主要用于物理层/MAC层的精确建模
- 它们并非为实时运行设计: 随着场景复杂度的增加,计算成本会急剧上升,无法用于评估运行真实流量的长时间操作系统
-
虚拟网络仿真器 (Virtual-Network Emulators):
- 这类工具能实时执行真实的网络栈和流量,但受限于底层虚拟化技术的开销,无法实现规模与响应速度的兼顾
- 基于 Docker 的工具 (如 StarryNet, RHONE, OpenSN):
- 虽然能运行未经修改的应用,但容器本身存在文件系统和进程开销
- 此外,Docker 存在 1024 个节点的上限,且拓扑更新需要大量的内核操作,导致响应极慢
- 更致命的是,其离散的网络更新方式阻碍了在 "handover" 这一关键时刻进行连续测量
- 基于 MicroVM 的工具 (如 Celestial):
- 虽然隔离性好,但每个微虚拟机占用的大量内存使其根本无法扩展到数千个节点,只能在极小范围内运行
- 基于 Mininet 的工具 (如 LeoEM, xeoverse):
- 尽管使用了轻量级 Linux 进程,但拓扑改变仍需要大量的内核重配置操作,限制了大规模下的响应速度
- 且如 xeoverse 需要极长的预计算时间(约一小时),无法在运行时根据环境变化进行调整
综上所述,现有的虚拟网络仿真器由于架构限制和高昂的虚拟化开销,其重新配置时间(即使对 1000 个节点也需要一百多秒)过长,无法作为实时的网络数字孪生系统 。